Hexapod Stewart Platform Controllers, 6-Axis Motion Software
PI hexapod Stewart platform positioning systems combine parallel-kinematic mechanics with digital six-axis motion controllers, coordinate transformation software, simulation tools, scan routines and programmable pivot-point control.
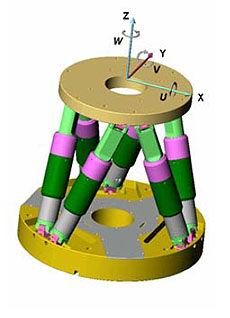
Hexapod control is different from conventional stacked-axis motion control. A hexapod does not move one independent mechanical axis at a time. Instead, the controller transforms Cartesian commands for X, Y, Z, pitch, roll and yaw into coordinated motion of six actuators. This allows the user to command a tool point, optical axis, sample location or payload center directly in space.
PI hexapod controllers include motion-control software, libraries, graphical tools and simulation functions for setup, programming, alignment and system integration.
Control of 6-Axis Parallel-Kinematic Positioners
All PI hexapod Stewart-platform positioning systems are supplied with high-performance digital motion controllers and software. The controller calculates the required motion of each strut while the user works in familiar Cartesian coordinates.
MotionX, Y, Z, pitch, roll, yaw
ControlVectorized path motion
SetupSimulation and load checks
Direct command of position and orientation in Cartesian coordinates
Smooth vectorized motion toward the specified target pose
Simulation tools to verify workspace, orientation and strut loads
Additional axes available for actuators, rotation stages or linear positioners
PI hexapod controllers allow the user to define the pivot point by software. The center of rotation can be placed anywhere inside or outside the physical hexapod workspace, making it possible to rotate around an optical axis, beamline point, tool tip, sample center or other application-specific coordinate.
Why the Pivot Point Matters
In photonics alignment, optics testing and precision assembly, the useful point of rotation is often not the mechanical center of the platform. User-programmable, software-defined pivot control makes the payload move around the point that matters to the process.
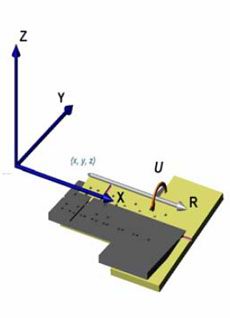
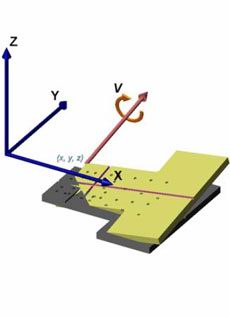
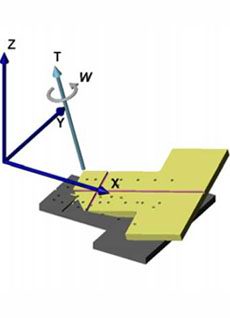
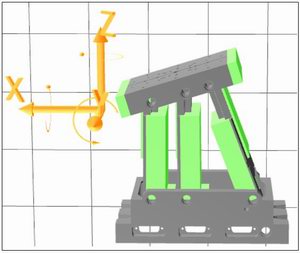
Coordinate Transformation
The controller handles the parallel-kinematic transformations internally. Users can enter Cartesian position and orientation commands directly while the controller coordinates the six actuators.
Hexapod coordinate system used for six-axis position and orientation commands.Platform position and orientation examples for visualizing coordinate transformation.Platform at initial position and commanded angular orientation.Example of combined X, Y, Z and angular motion.
Interfaces for Hexapod Controllers
Interface
Use
TCP/IP Ethernet
Industry-standard network control and remote access.
EtherCAT
Optional real-time automation interface for machine integration.
Keyboard and Monitor
Standalone operation and local setup.
Manual Control Pad
Interactive six-axis manual positioning during setup and testing.
RS-422
Optional long-distance communication up to 1.4 km.
Analog and Optical Inputs
Optional inputs for alignment, measurement and automation tasks.
Hexapod Software Components
Programming and External Control
Windows DLLs and Linux libraries
LabVIEW VIs and example programs
ASCII command communication
PI General Command Set compatibility
Ethernet-based remote control
Application Routines
Scan routines for multi-axis searches
Automated alignment routines
Photonics alignment and test routines
Flight simulator interface with demo software
Optional optical boards for IR and visible-light alignment
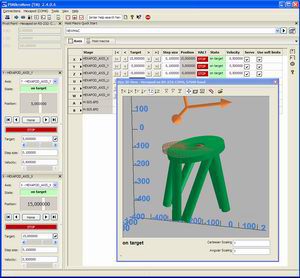
PIMikroMove Software
PIMikroMove provides graphical control of connected controllers and mechanical axes, including hexapod geometry visualization and interactive motion tools.
Control connected controllers and axes in one window
HostMacros for command sequences on the host PC
Position pad for mouse and joystick control
3D visualization of connected hexapod geometry
Analog input visualization
Compact and Custom Hexapod Controllers
PI offers standard compact hexapod controllers as well as custom controller configurations for OEM systems, research instruments and specialized parallel-kinematic applications.
Six-axis vector motion control
Controller configurations for standard and custom hexapods
Integration with additional motion axes and external devices
Support for customer-specific automation environments
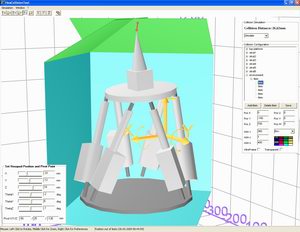
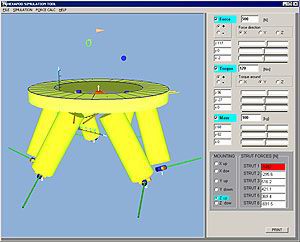
Simulation and Workspace Verification
Hexapod Simulation Software
Simulation software helps engineers configure a hexapod before installation and verify whether the required motion can be achieved without collisions, overloading individual struts or leaving the usable workspace.
Graphical offline configuration of the hexapod in the customer environment
Workspace and load verification for different mounting orientations
Interference prediction with possible obstacles
Rendering and playback of hexapod configurations
Useful for vacuum chambers, optical benches, beamlines and machine integration
Software tools support workspace verification and load checks for different mounting orientations.Included software supports scan routines and automated alignment of fiber optic components and other precision assemblies.Custom hexapod controller configuration.Graphical representation of a tripod positioner and its workspace.
Command Set, Operating Systems and Libraries
The command set is compatible with PI's General Command Set and includes fast scan and alignment routines for precision positioning tasks. Hexapod controllers are supplied with a complete software package for Windows and Linux operating systems. Custom software can communicate through ASCII strings, Windows DLLs, Linux libraries or LabVIEW drivers.
LabVIEW Drivers
Driver Support
Full set of LabVIEW VIs
GUI programs including terminal applications and configuration tools
Graphical scanning routines
Online help window for each VI
Compatibility with PI's General Command LabVIEW Driver Set
Integration Benefits
LabVIEW support simplifies integration into test systems, optical alignment benches, scientific instruments and automated production equipment.
Hexapod Options and Accessories
Optical Metrology / Power Meters
The F-712 optical power meter is available for fiber-optic alignment applications and other automated optical search routines.
Interactive 6-Axis Manual Control Pad
A manual control pad facilitates setup and testing. Programmable step sizes from 0.1 µm to 500 µm linear and 0.0001° to 0.5° angular allow precise manual positioning while maintaining the true controller position registers.
Custom Hexapod Controllers
In addition to standard controller and software packages, PI has designed parallel-kinematics controllers for customer-specific applications. These solutions can support specialized hexapod geometries, extra axes, automation interfaces, alignment routines and dedicated system-control workflows. In addition to hexapod motion systems, PI also provides a large variety of different parallel-kinematics nanopositioning systems.